



【好文分享】Pro’s Kit 科學玩具:液壓機械手套 Part 2 轉載自Heresy
【轉載】Pro’s Kit 科學玩具:液壓機械手套 Part 2
在前一篇,Heresy 算是按著說明書,把「握把」、「手掌」、「手指」三個部分都組合好了。
而如果按照說明書,接下來則是「液壓系統」、「拇指」、「支撐墊」、「合體」這樣的順序。
不過,由於 Heresy 當下是趴在床上組的,不是很想去弄有油有水的部分,所以就決定把說明書往後翻,開始先組後面液壓以外的部分了。 ^^"

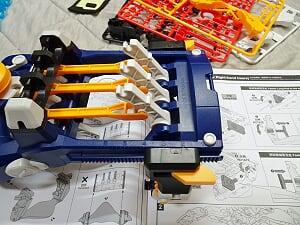
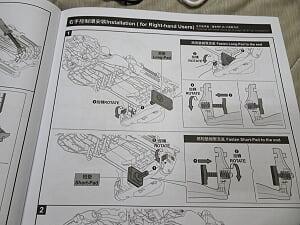
■ 手指+手掌
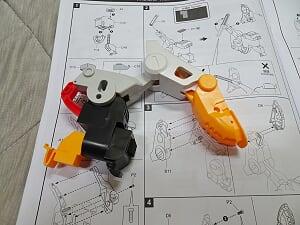
Heresy 這邊,是順著之前的流程,先把手掌和手指裝在一起。


個人覺得這邊的控制機制也還算滿有趣的~
在把手指底座的轉軸、齒輪放進手掌的框架後,要在那個黃色的齒輪旁、放一根白色螺旋狀的轉軸、讓他可以帶動整個手指的底座。


放好後,這邊要先用一個黑色的零件固定住它的位置、避免它跑掉。


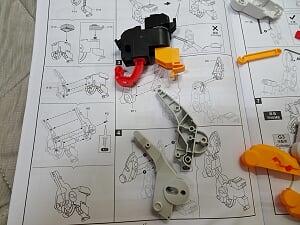
然後,在上面還要再裝一個橘紅色的小齒輪。
而接下來,它上面還要再蓋一層零件,這邊有一個比較大的白灰色齒輪、要去帶動那個小的橘紅色齒輪。
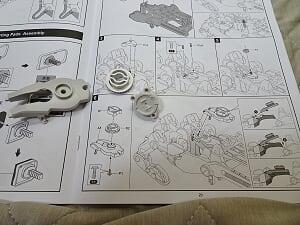
裝上去後,就是下面左圖的樣子。


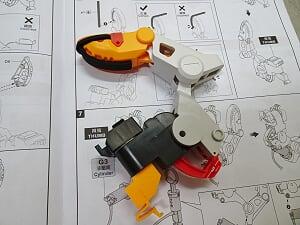
之後,則還要再加上一個橘紅色的上蓋,讓它的標示更明顯、同時也更好轉~

最後,則還有兩個零件,與其說是支撐,應該也是裝飾性的零件了。
下面就是這部分都裝好後的樣子。

之後旋轉這個旋鈕,就可以調整三根手指的角度了~調整的空間高達 70 度。
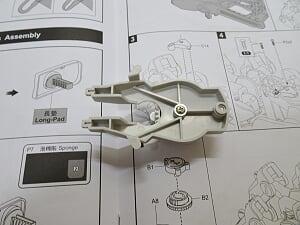
■ 手掌+握把
接下來,恩…都合體了,那就繼續把握把也裝上去吧~
稍微看了一下,才知道原來他的固定方法,算是滑軌形式的。
在手掌的兩側有具有刻度的軌道,可以讓握把滑進去;而握把上的橘黃色可動零件,則就是用來固定位置用的。而為了方便調整位置,兩側也都有數字的刻度、讓兩側不會卡在不同的位置。
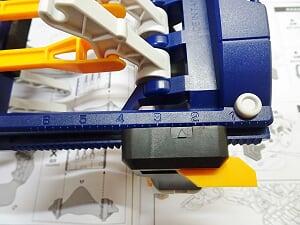

上方就是裝好的樣子了。
■ 支撐墊
再來,則是支撐墊的部分。老實說,剛看開始組這部分的時候,有點搞不清楚這是幹嘛的?後來才發現,是用來做握把的緩衝用的。
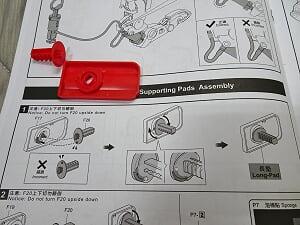
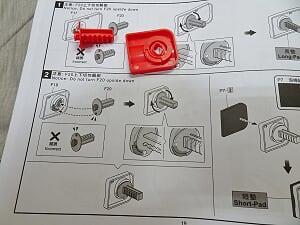


這邊主要有兩塊一長一短的紅色方塊,上面都安裝了一根有螺紋的柱子。
在比較小的那一塊,則也要貼上泡棉(下左圖)。

看了說明書,才發現是要裝在握把內側的兩邊,並可以透過那個橘黃色、有刻紋的柱子來調整間距。


透過這樣的機制,他基本上提供了一個不錯的方法,來對應不同大小的手掌;如果是小朋友手比較小一點,也可以把他轉出來、讓間距變小。
不過另一方面,對 Heresy 來說、它的大小只是剛好而已,如果手再大一點,可能就得把這兩塊支撐墊拆掉才能伸進去了。
■ 指套
不照順序的最後一步,則是三隻手指的「指套」。
針對三個手指,他用了不同顏色、不同造型的指套。黑色的是給十指用的,黃色的是給中指用的,橘色的則是可以同時給無名指和小指使用;這樣的設計,應該是考慮到小指和無名指比較沒力氣吧?
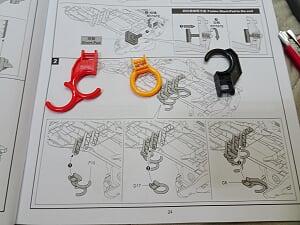

而也由於這樣採用不同的零件,所以在長度的部分也更符合人體工學,握起來更順手~
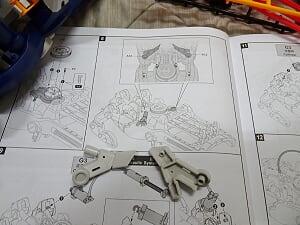
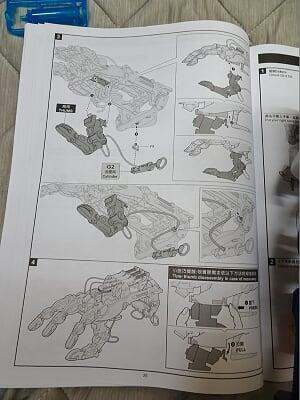
■ 拇指
在還不想碰液壓的部份的狀況下,最後組裝的部分,就是拇指和液壓無關的部分了。
首先,下面是拇指的底座部分。


老實說,有一些搞不懂是幹嘛的零件?不過這邊就先不管了。
再來,則是拇指的第一節。本來還以為這邊會是可動的,結果沒想到是固定式的…
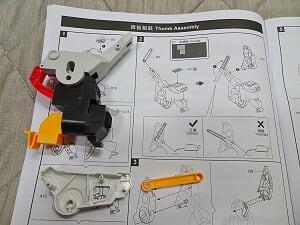
接下來,姆指也是有和其他手指一樣的連桿機制的~基本上可動關節一樣是兩個,運作模式也大同小異。

同樣的,在指尖要貼上泡棉,來增加摩擦力,讓他可以拿東西。
下面就是完成的拇指(不含液壓)了~

最後,就是要把拇指裝到整個手套上了!
這邊的設計,是採用卡榫式的安裝,在手套上有三個位置可以固定,分別對應左手、有右手,以及中間這種比較不像人手的模式。
由於 Heresy 到目前為止都是照著右手模式組裝下來的,所以這邊也就裝在右手的位置了~
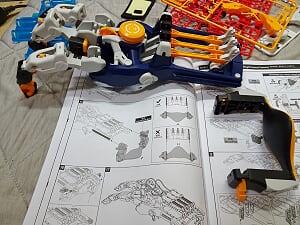
而到這邊,算是把這隻液壓機械手套不含液壓的部分都完成了!
下面就是「不含液壓零件」的「液壓機械手套」成品(笑)了!


看起來好像很完整了?但是由於還沒有上液壓的部分,所以也沒無法操作,只是徒具其型而已。
下一篇就是最後,把液壓部分完成的成品了!
超詳盡組裝攻略Part1
更多組裝手套攻略,來看Part 2
最終成品與使用心得,就在終極最終章Part3
原文來源:https://kheresy.wordpress.com/2020/05/08/pros-kit-hydraulic-cyborg-hand-p2/
在前一篇,Heresy 算是按著說明書,把「握把」、「手掌」、「手指」三個部分都組合好了。
而如果按照說明書,接下來則是「液壓系統」、「拇指」、「支撐墊」、「合體」這樣的順序。
不過,由於 Heresy 當下是趴在床上組的,不是很想去弄有油有水的部分,所以就決定把說明書往後翻,開始先組後面液壓以外的部分了。 ^^"
■ 手指+手掌
Heresy 這邊,是順著之前的流程,先把手掌和手指裝在一起。
個人覺得這邊的控制機制也還算滿有趣的~
在把手指底座的轉軸、齒輪放進手掌的框架後,要在那個黃色的齒輪旁、放一根白色螺旋狀的轉軸、讓他可以帶動整個手指的底座。
放好後,這邊要先用一個黑色的零件固定住它的位置、避免它跑掉。
然後,在上面還要再裝一個橘紅色的小齒輪。
而接下來,它上面還要再蓋一層零件,這邊有一個比較大的白灰色齒輪、要去帶動那個小的橘紅色齒輪。
裝上去後,就是下面左圖的樣子。
之後,則還要再加上一個橘紅色的上蓋,讓它的標示更明顯、同時也更好轉~
最後,則還有兩個零件,與其說是支撐,應該也是裝飾性的零件了。
下面就是這部分都裝好後的樣子。
之後旋轉這個旋鈕,就可以調整三根手指的角度了~調整的空間高達 70 度。
■ 手掌+握把
接下來,恩…都合體了,那就繼續把握把也裝上去吧~
稍微看了一下,才知道原來他的固定方法,算是滑軌形式的。
在手掌的兩側有具有刻度的軌道,可以讓握把滑進去;而握把上的橘黃色可動零件,則就是用來固定位置用的。而為了方便調整位置,兩側也都有數字的刻度、讓兩側不會卡在不同的位置。
上方就是裝好的樣子了。
■ 支撐墊
再來,則是支撐墊的部分。老實說,剛看開始組這部分的時候,有點搞不清楚這是幹嘛的?後來才發現,是用來做握把的緩衝用的。
這邊主要有兩塊一長一短的紅色方塊,上面都安裝了一根有螺紋的柱子。
在比較小的那一塊,則也要貼上泡棉(下左圖)。
看了說明書,才發現是要裝在握把內側的兩邊,並可以透過那個橘黃色、有刻紋的柱子來調整間距。
透過這樣的機制,他基本上提供了一個不錯的方法,來對應不同大小的手掌;如果是小朋友手比較小一點,也可以把他轉出來、讓間距變小。
不過另一方面,對 Heresy 來說、它的大小只是剛好而已,如果手再大一點,可能就得把這兩塊支撐墊拆掉才能伸進去了。
■ 指套
不照順序的最後一步,則是三隻手指的「指套」。
針對三個手指,他用了不同顏色、不同造型的指套。黑色的是給十指用的,黃色的是給中指用的,橘色的則是可以同時給無名指和小指使用;這樣的設計,應該是考慮到小指和無名指比較沒力氣吧?
而也由於這樣採用不同的零件,所以在長度的部分也更符合人體工學,握起來更順手~
■ 拇指
在還不想碰液壓的部份的狀況下,最後組裝的部分,就是拇指和液壓無關的部分了。
首先,下面是拇指的底座部分。
老實說,有一些搞不懂是幹嘛的零件?不過這邊就先不管了。
再來,則是拇指的第一節。本來還以為這邊會是可動的,結果沒想到是固定式的…
接下來,姆指也是有和其他手指一樣的連桿機制的~基本上可動關節一樣是兩個,運作模式也大同小異。
同樣的,在指尖要貼上泡棉,來增加摩擦力,讓他可以拿東西。
下面就是完成的拇指(不含液壓)了~
最後,就是要把拇指裝到整個手套上了!
這邊的設計,是採用卡榫式的安裝,在手套上有三個位置可以固定,分別對應左手、有右手,以及中間這種比較不像人手的模式。
由於 Heresy 到目前為止都是照著右手模式組裝下來的,所以這邊也就裝在右手的位置了~
而到這邊,算是把這隻液壓機械手套不含液壓的部分都完成了!
下面就是「不含液壓零件」的「液壓機械手套」成品(笑)了!
看起來好像很完整了?但是由於還沒有上液壓的部分,所以也沒無法操作,只是徒具其型而已。
下一篇就是最後,把液壓部分完成的成品了!
超詳盡組裝攻略Part1
更多組裝手套攻略,來看Part 2
最終成品與使用心得,就在終極最終章Part3
原文來源:https://kheresy.wordpress.com/2020/05/08/pros-kit-hydraulic-cyborg-hand-p2/